Introduction:
This week's activity was a sort of "capstone" to many previously performed activities in the class. It combined geodatabase creation, ArcPad deployment and use to gather data, field map creation, and field navigation. The activity involved gathering points in using ArcPad at various stations set up in the woods surrounding the
UWEC Priory (see
Field Activity 10 for the study area). The same groups of 3-4 people were assigned and groups were told they'd be navigating the entire course that they'd only navigated a third of in Field Activity 10. However, this time the groups were allowed to deploy whatever data they felt necessary to a GPS through ArcPad and use whatever maps they wanted. A large amount of data was provided by Professor Joe Hupy, including the locations of the stations. Not only would this task be required, but the groups were to be given paintball guns and equipment provided by the geography program and Joe Hupy.
The activity was turned into a competition to see who could complete the course the fastest with rules being set regarding the paintball guns. The groups would each have a different starting point and would attempt to complete the course from there. Also, if a group member was shot the group would be required to wait a minute; these minutes would be crucial in determining who would complete the activity fastest.
Methods:
The first step in preparing for the activity was creating a geodatabase to deploy to ArcPad and store all of the necessary data. The geodatabase was promptly created and the group set to work in trying to decide which data would be used of the data which was provided. It was decided that the group would create both a map to carry in hand, and deploy data to the GPS. This was done in order to have as little data as necessary in the GPS to help prevent it from having trouble loading while moving throughout the course. The map was to contain much more detail and would be referenced if needed.
A geodatabase was promptly created with a domain added with point numbers as short integer coded values between 1 and 15 as there were fifteen points throughout the course. Creating this coded domain allowed the group to save a little bit of time by just selecting the number from a drop-down menu and avoid error. With the geodatabase created, a feature class was created in it to gather the station points with the domain properly set (a task learned in
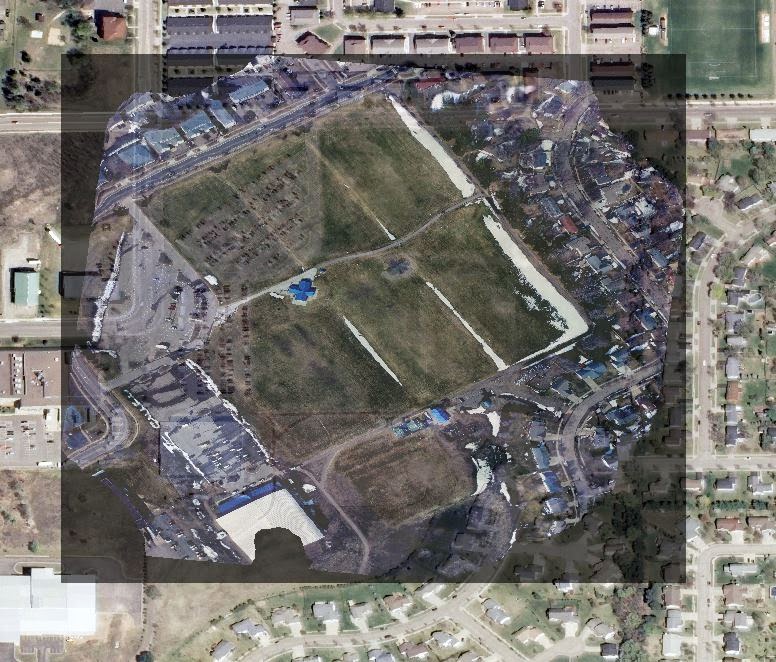
Field Activity 6), the group decided that it was crucial to create a path of travel. The paths were not provided, though the locations of the stations were provided (Figure 1). The next logical step since paths were not provided was to create paths. This was done by digitizing lines between all logical neighboring points (Figure 2).
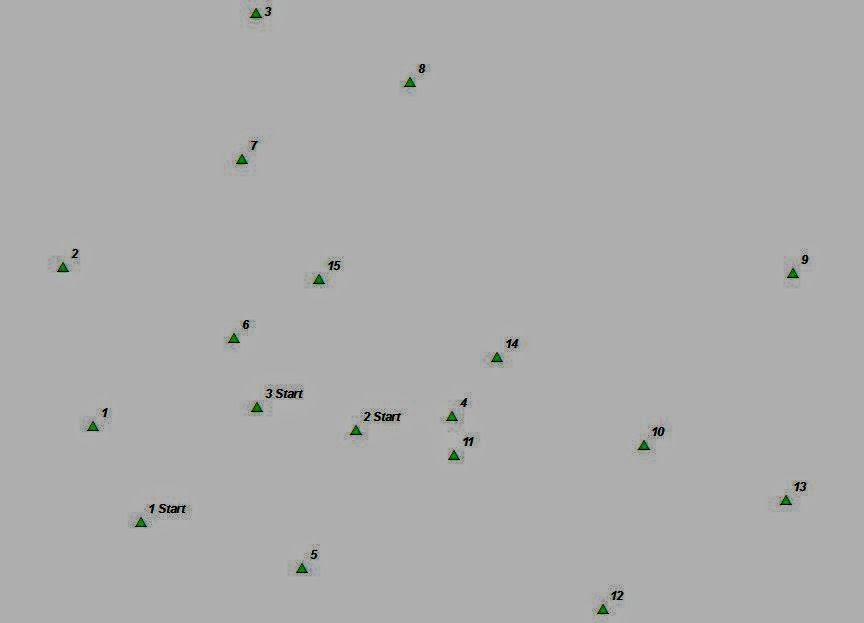 |
| The locations of each station point were given as a feature class by Joe Hupy. The points were subsequently numbered off and labeled based on the station number. The Start points were for the previous activity. In this activity each group was required to start in a different location throughout the course. Station 5 was the starting point for group 2. (Figure 1) |
 |
| Logical paths were subsequently digitized as lines between points that made sense to travel between. This was done to determine which paths would be the best route by looking at other data. The red zones are no-shooting zones for the paintball guns. These zones were to be avoided as much as possible. (Figure 2) |
To help determine the best paths, a slope value was created using a DEM to find the areas with the greatest change in elevation that should be avoided as much as possible to save energy and time. This, as well as looking at satellite imagery, taking into account distance, and considering the locations of the no-shooting zones helped group 2 decide which paths would be best used and eliminate the rest (Figure 3). This path of travel, the point locations, no-shooting zones, and the created feature class to gather new points were uploaded into ArcPad and the GPS (Figure 4). These features were chosen as none of them were too large as to slow the GPS down and they were all the most necessary features. A map was then created with more detail to help the group in occasions of need (Figure 5).
 |
| Three different slope values were assigned based on the slope degree. Green is low, yellow medium, and red high. It was attempted to avoid the red areas as much as possible and stay in the green to allow for fast travel. Also the checkered no-shooting zones were attempted to be avoided. This allowed for a creation of the red line which is the path of travel. The idea was that as long as the group stuck to this line, all of the points would be easily found. (Figure 3) |
 |
| This is the final product that was uploaded into ArcPad. It includes the chosen path, the given point locations, and the no-shooting zones. Also included is the feature class that was to be gathered along the way though it's not pictured here as this is a before image. These features were all chosen as they were important and not so large as to slow down the GPS. (Figure 4) |
 |
| The map created for the activity contained a larger amount of detail than that uploaded into the GPS. Included in this map is everything included in the GPS, a satellite image of the area, the slope values of the area, and known trail paths in purple. Also a scale and grid were included, as well as the estimated pace count between each point. This was referenced several times throughout the activity in order to better situate the group when the info on the GPS was not quite enough. (Figure 5) |
When the class arrived to the location, guns and masks were handed out. The group booted up the GPS and opened the map file that contained all of the necessary data. However, the GPS couldn't find the signal because it could not find a conversion of WGS to NAD83. This caused a problem for several minutes but was solved by opening up a new map and bringing in the required data. This was a minor problem that was fortunately solved but could have been larger. Also, it could have been avoided if proper tests were run beforehand. This is a good lesson to take remember in the future. The groups set off to their starting points with group 2 heading to point 5. The point was found easily, along with the first six other points (5, 11, 4, 14, 10, 12, and 13).
The group was already almost halfway through the course when they encountered another team. The other team held up the group for several minutes and the group actually got separated. However, they were able to reconvene and continue to the next point, with only one of the group members getting tagged (in the face). The next point (9) was found with ease as well, though the GPS acted up and had to be saved and reloaded which took up some time. The path from point 9 to point 8 involved crossing through a no-shooting zone. However, it was decided to simply go around to avoid any trouble as this area was in the open and it was told to us that it was best to stick to cover and avoid open areas lest people become suspicious of the guns. This took more time, though point 8 was eventually reached, and the group set off to point 9. It is here where another team was encountered, holding up the group for another several minutes. Eventually the two groups passed by each other with a member from group 2 being tagged. At this point there'd been two skirmishes with two losses. The group was determined to win the next skirmishes.
Points 3 and 7 were encountered and recorded. At each station, the group would record the point in the GPS and use the drop-down menu created thanks to setting the domain in order to number the point correctly. It was near point 15 that a third team was encountered. This time, all of the opposing team was tagged with one of group 2 being tagged as well (finally success!). The two groups hung around awhile and chatted about the activity so far. Though this used time, it reminded everyone that this was really an activity designed to be fun and help everyone use the skills they'd gathered throughout the entire class.
Directly after point 15 was gathered another team was encountered and ambushed with a member of their team being tagged twice. At this point group 2 had gone through four skirmishes with two wins and two losses (a respectable record). The final three points were subsequently encountered and recorded (points 6, 2, and 1). All of the points had then been found and recorded (Figure 6). Group 2 then returned to the starting location to see that they'd been just beat out by another team.
 |
| The blue triangle are the points that were recorded in ArcPad and uploaded into the geodatabase on the computer after the activity was over. The points are for the most part extremely near where they were supposed to be and all the course points were recorded. (Figure 6) |
Discussion:
This activity was a capstone experience for the entire course and took skills learned in Field Activities 5, 6, 8, and 10 and combined them all into one activity with paintball guns which, of course, raised the pressure. The initial creation of the database and feature classes along with map design all went extremely smoothly. However, after he data was deployed to ArcPad, all the group did was open it to see if it was there, they didn't go outside to see if they could get the GPS signal. This was almost a major problem as right before the activity the GPS wasn't finding, however it was solved by bringing all of the feature classes into a new map. This taught the group to be sure to always double check and make sure everything works beforehand (a lesson which should have been learned at this point).
The actual navigation went well, with the group having minor problems with the GPS being unresponsive at one point, though this was solved by simply reopening a new map. Using the paintball guns made the navigation more difficult as carrying he guns and wearing the masks made travel more strenuous.
Conclusion:
This activity reaffirmed many skills learnt throughout the course and even taught some more new lessons. It also aided in building a stronger camaraderie among the class which is always a good thing to do. The using of the GPS as opposed to the orienteering method performed in Field Activity 10 was a good contrast and showed advantages and disadvantages of both.